敖晟,博士,现为厦门大学信息学院计算机科学与技术系助理教授,硕士生导师。2024年6月于中山大学获得信息与通信工程专业工学博士学位,2025年2月加入厦门大学信息学院。

教学方面:担任《算法设计与分析A》课程助教,负责设计《深度学习》课程改革方案。始终以饱满的热情投入教学工作,恪守教书育人初心,致力于为学生的成长成才及学科发展贡献智慧与力量。
科研方面:主要研究方向为三维视觉,包含三维点云处理、激光雷达定位等。近五年来,以第一作者/通讯作者身份在TPAMI和CVPR上发表论文5篇,其中一作论文单篇最高被引400余次,2篇论文分别获评2022年深圳市第二届优秀科技学术论文、2023年深圳市第三届优秀科技学术论文;获授权国家发明专利6项,荣获深圳人工智能优秀博士学位论文奖;担任CSIG成像探测与感知专委会副秘书长、第三届激光雷达专业委员会AI先进算法工作组副组长、首届中国空间智能大会竞赛主席;长期担任TPAMI、IJCV、TIP、TVCG、CVPR、ICCV等国际顶级期刊及会议的审稿人。
主要研究成果:
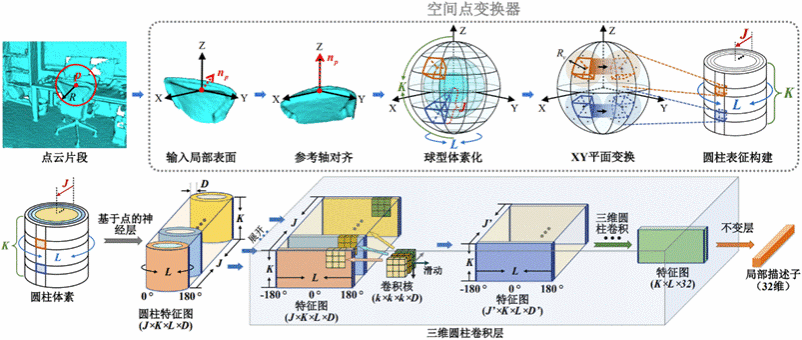
(1)三维点云特征学习
针对现有技术对噪声敏感或旋转退化等问题,提出一种新颖的点云特征学习网络。该网络通过创新性地融合空间点转换器、三维圆柱卷积层及不变层,有效实现了旋转不变、高判别性且普适性强的局部表面描述子提取。该框架成功克服了旋转敏感性等关键挑战,显著提升了特征表达的鲁棒性与泛化性能,为点云特征学习建立了新的理论框架。
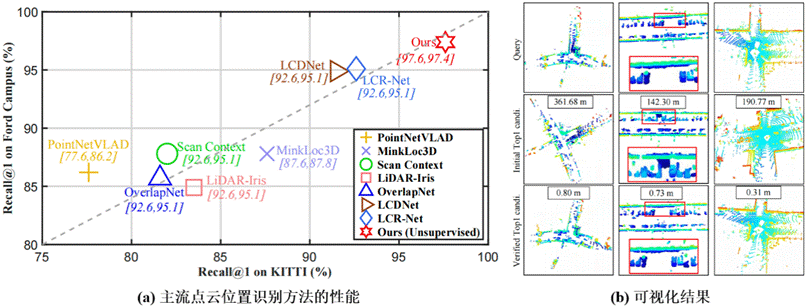
(2)三维点云位置识别
针对点云定位中位姿标签获取困难的问题,提出一种无监督的激光雷达点云位置识别框架。该方法通过深入挖掘点云序列蕴含的时空关联性构建自监督信号,并设计联合学习局部与全局特征的网络架构,有效抑制误匹配并精准识别历史场景点云。进一步地,提出一种鲁棒的局部参考坐标系动态构建技术,使其能够自适应复杂环境变化,显著提升位置识别的准确性与环境适应性。
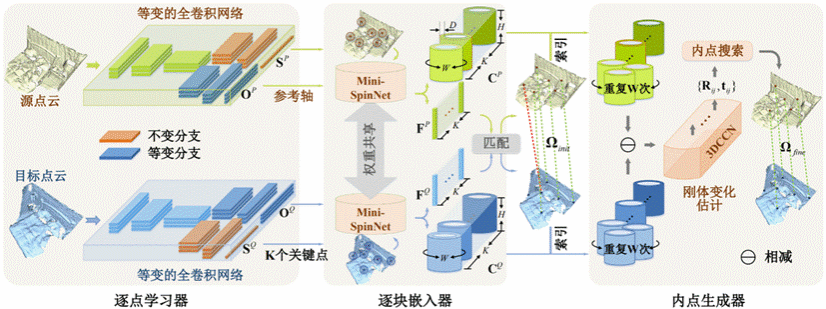
(3)三维点云位姿估计
针对现有技术计算耗时或泛化不佳的问题,提出一种高效且通用的三维点云配准框架。该框架创新性地结合逐点学习器与逐块嵌入器,突破了单一表征的局限性,实现了配准精度、计算效率与泛化能力三者间的平衡。此外,开发了一种渐进式点云对应关系优化方法,并提出一种基于扩散优化理论的激光雷达里程计网络,显著提升了里程计在复杂场景下的鲁棒性。